Conception d'un capteur d'accélération pour voiture télécommandée

Introduction
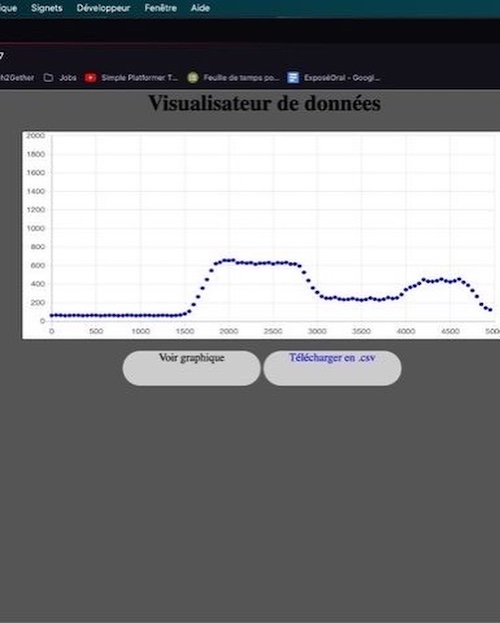
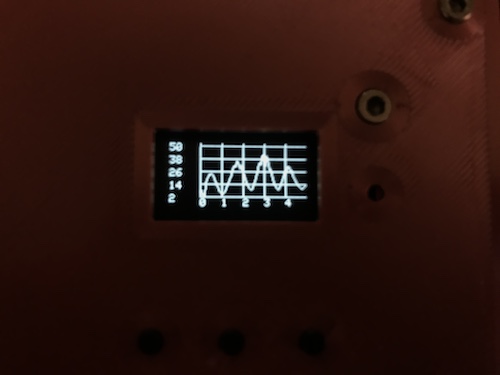
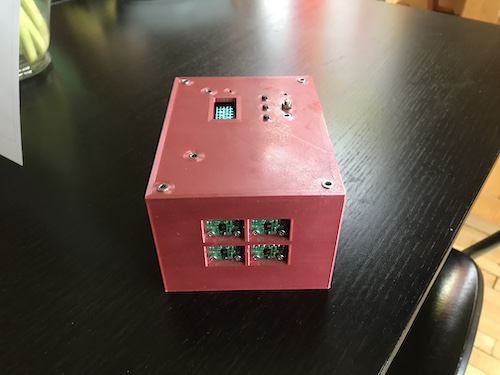
Ce projet consiste en un capteur de distance mesurant la position d'un wagon se déplaçant sur un rail d'une longueur totale de 2 m. Les captures de la position se font à une fréquence de 20 Hz et permettent de calculer la vitesse du wagon ainsi que son accélération en effectuant une double dérivée. Mon capteur de distance est contrôlé par un microprocesseur appelé ESP32, qui permet à l'utilisateur de visualiser le graphique sur un écran OLED et de télécharger un fichier Excel contenant les données de position du wagon selon le temps.

Contexte et motivation
Contexte : Ce projet avait pour but de répondre à un besoin du département de physique du cégep de Saint-Laurent. Certaines expériences de laboratoire proposées dans les cours de physique consistaient à mesurer l'accélération d'un wagon qui accélère sur un rail grâce à une masse reliée à une corde attachée au wagon. Ils utilisaient déjà une solution proposée par une compagnie se concentrant sur des produits éducatifs, mais leurs produits coûtent cher et le logiciel faisant l'interface entre l'appareil et les ordinateurs est compliqué à utiliser.
Motivation : Je voulais créer ce produit, car j'étais motivé à concevoir un appareil utile pour l'éducation, plus intuitif et moins cher que ceux de la concurrence.
Objectifs et résultats
Objectif : Mon objectif est de créer un produit capable de capturer l'accélération des wagons sur les rails, puis d'enregistrer les données dans un fichier CSV. L'étudiant pourra ensuite afficher une interface web hébergée par le MCU du capteur pour visualiser les graphiques des données capturées et télécharger les données brutes.
Résultat : Mon capteur atteint les spécifications données, et je suis désormais capable d'expliquer et de réparer chaque sous-système impliqué dans ce projet.
Technologies et outils utilisés
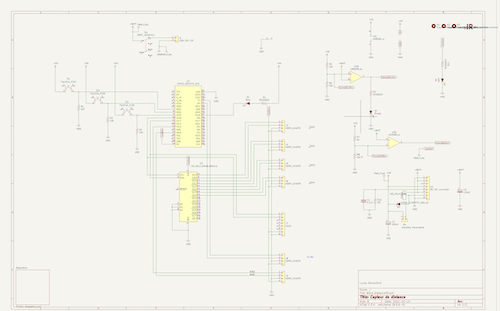
PCB : KiCad
CAD : Fusion360
Firmware : Arduino
Fonctionnement détaillé
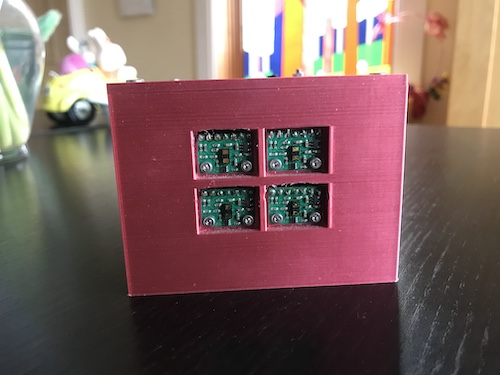
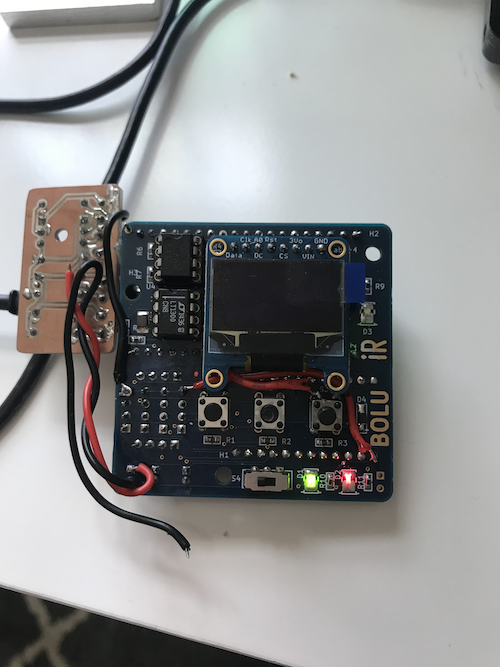
Le capteur est équipé de quatre capteurs Time of Flight. Ce sont des capteurs de distance infrarouge qui mesurent le temps que la lumière met pour atteindre une surface, rebondir et revenir à sa source. Les données de ces capteurs sont recueillies par un ESP32, qui effectue ensuite les calculs pour obtenir l'accélération à l'aide des distances mesurées en effectuant une double dérivation numérique. Le MCU agit ensuite comme serveur web, permettant au client de se connecter et de visualiser les données via une interface web.
Détails techniques et innovations
- Fréquence de capture de données : 20 Hz
- Précision : ±2 mm
- Distance max : 2 mètres
- Connectivité : Wi-Fi
- Autonomie : 7 h
- Écran OLED intégré
- Capteurs : Time Of Flight
Défis rencontrés et solutions apportées
Faible précision : En augmentant la fréquence de capture de ce type de capteurs, la précision diminue proportionnellement.
Solution : Utiliser 4 capteurs au lieu d'un seul. De cette manière, il est possible d'obtenir une fréquence de capture élevée tout en maintenant une bonne précision. En configurant les capteurs pour qu'ils aient chacun une fréquence de 5 Hz, leur précision est meilleure, et je peux utiliser leurs données en alternance pour obtenir une fréquence globale de 20 Hz (5 Hz × 4 capteurs).
Améliorations futures
Rendre le produit plus compact afin de faciliter son utilisation.
Ajouter un système de recharge de batterie interne.
Utiliser des composants CMS à la place de composants traversants.
Réduire les interférences dues au Wi-Fi dans les environnements saturés d'appareils connectés.
Conclusion et impact
Résultats :
- Le coût total des pièces du capteur est d'environ 40 $ CAD.
Performances :
- Le capteur est capable de prendre des données et peut être calibré si les distances mesurées ne sont pas exactes.